
2020年に入ってAZ GTiを買ってから、この値段で自動導入があるのか!と感動して使ってました。ただ、望遠鏡をのぞきながらアプリのボタンを操作するのがやりにくくて、このアイデアを思いつきました。
使い勝手が良かったので、いくつか作って売ってみてもよいかな、と考えたのだけれど、「任天堂の製品を改造して売る」というのは、任天堂さんの知的所有権を侵害することになるので、法的に販売ができない。、、、ということで、ここに作り方を公開して、ついでにスケッチのソースも公開して、皆さん個人に自由に工作してもらおうということにしました。
製作に必要なもの
- Nintendo Wii 用ヌンチャク (正規品の方が良い。理由は後述)
- arduino pro mini、もしくはその互換品
※ ProMiniには3.3V版と5V版がある。AZ GTiのシリアルと、ヌンチャク電源は3.3vなので仕様的には3.3V版がベターだが、AZ GTiシリアルもヌンチャク電源も5Vで問題無く動作するので、どちらでもよい。 - 圧電ブザー 発信回路無し、ワイヤー付きのもの。直径20㎜以内。
- RJ12 6P4C 4極プラグ
- Y字特殊ドライバー(ヌンチャクが任天堂正規品の場合に必要)
- はんだごて、ハンダ
- モジュラープラグ用圧着工具
はじめに
ヌンチャクには任天堂正規品と海外サイトなどで買える互換品がありますが、いろいろ試してみた結果、正規品を使う事をお勧めします。理由は以下の記事中で随時指摘します。
Arduinoにスケッチを書きこむ
AZ ヌンチャクのスケッチはここにアップしました。(2025/2/8更新:AZ-GTiの新ファームウェア対応)
github.com/naokiueda/az-nunchuk
「とりあえず動かした」レベルのコードで、とても他人様にお見せできるようなコードではないのですが、いずれコードは綺麗に整理するとして、まずは動いているものをアップします。
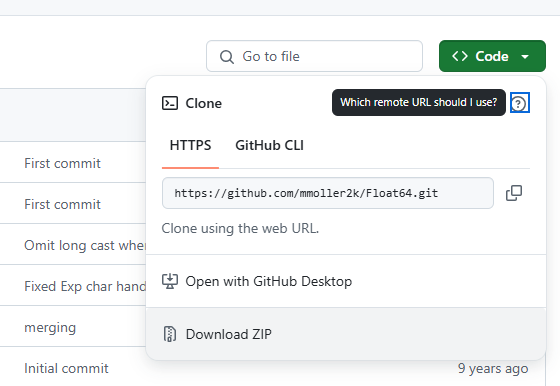
あと、コンパイル時にFloat64というライブラリが無くてエラーになる場合、インストールする必要があります。下記のサイト
https://github.com/mmoller2k/Float64
にて[Code]ボタンから[Download ZIP]でzipファイルをダウンロードし、
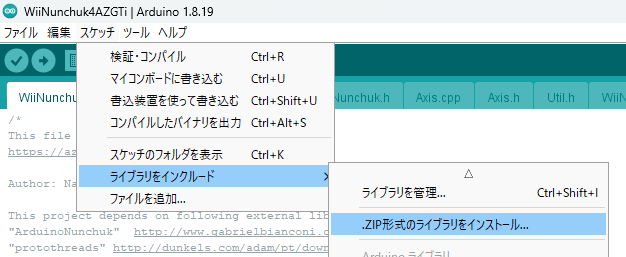
Arduino開発ツールの
[スケッチ]→[ライブラリをインクルード]→[.ZIP形式のライブラリをインストール]でインストールできます。
Arduino Pro MiniはUSBシリアル変換チップが載っていませんので、スケッチを書き込むには別途USBシリアル変換ケーブル等が必要になります。
こちらのサイトなどを参考にしてください。
ヌンチャクの分解
任天堂ヌンチャクの分解にはY字型の特殊ドライバーが必要です。(互換品は通常のプラスドライバーです)


AZ GTi側のコネクタを付ける
AZ GTiとの接続はRJ11/RJ12の6P6C/6P4Cモジュラプラグです。モジュラケーブルを買ってきてそれを切って使ってもいいのですが、ワイヤーの芯が固いものが多く、ヌンチャク本体に基盤を押し込める際に折れたことが多かったので、使うなら柔らかいケーブルを推奨します。
ここでは市販のモジュラケーブルを使うのではなく、ヌンチャクについているケーブルを流用して作ります。ヌンチャクのケーブルはゲームに使うだけあって、柔軟性もちょうどよいです。
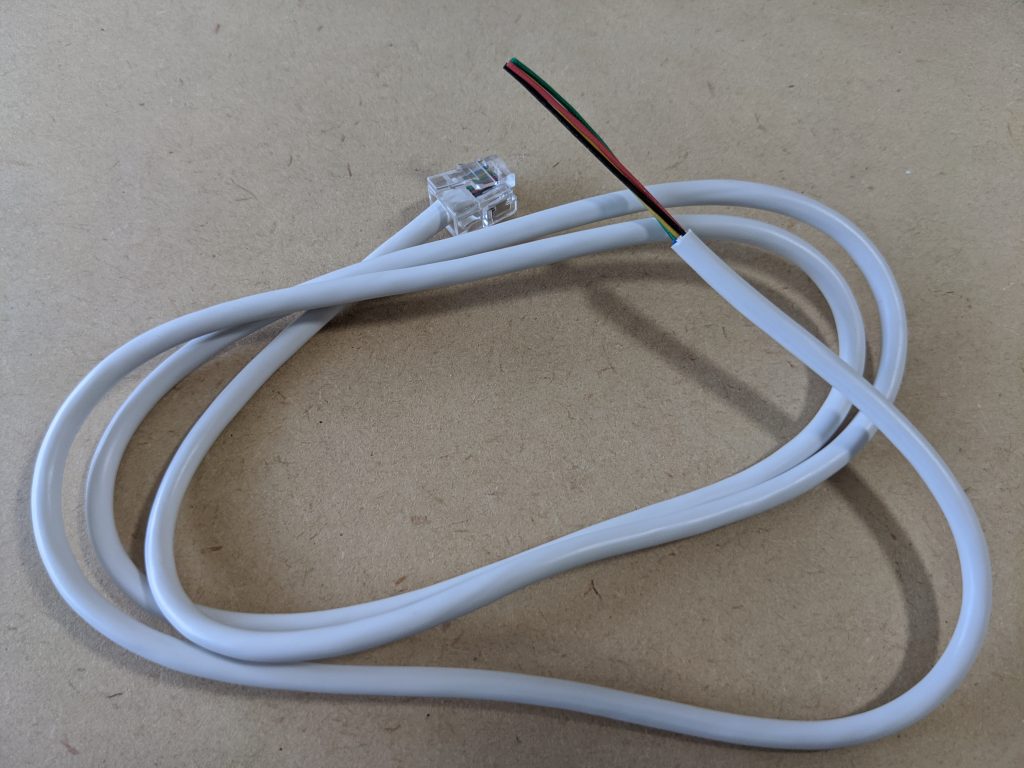
フラットタイプは柔らかすぎた。
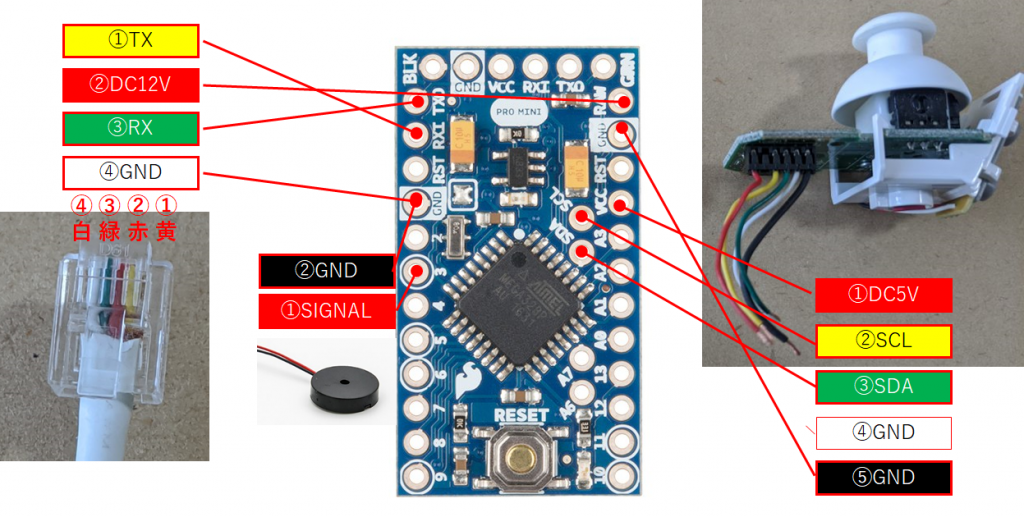
ケーブル先のWiiコネクタをカットして、RJ11/12 6P4Cコネクタに付け替えます。まずカットして6㎜外皮を剥きます。すると、シールド線が出ているのでこれをカットします。
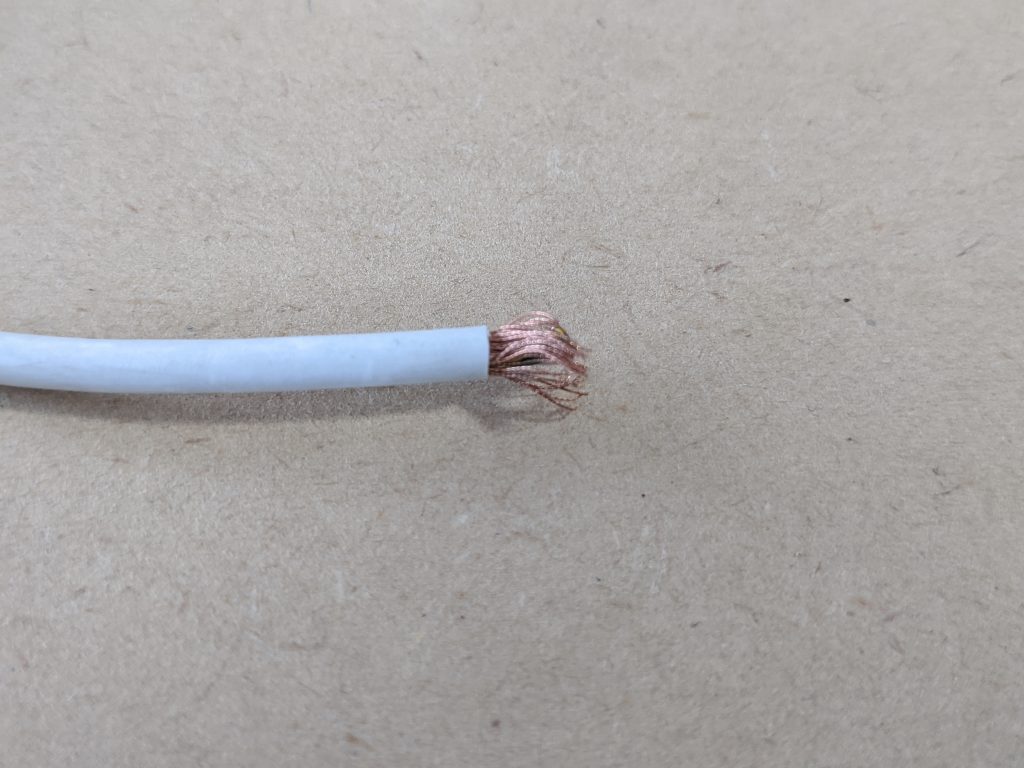
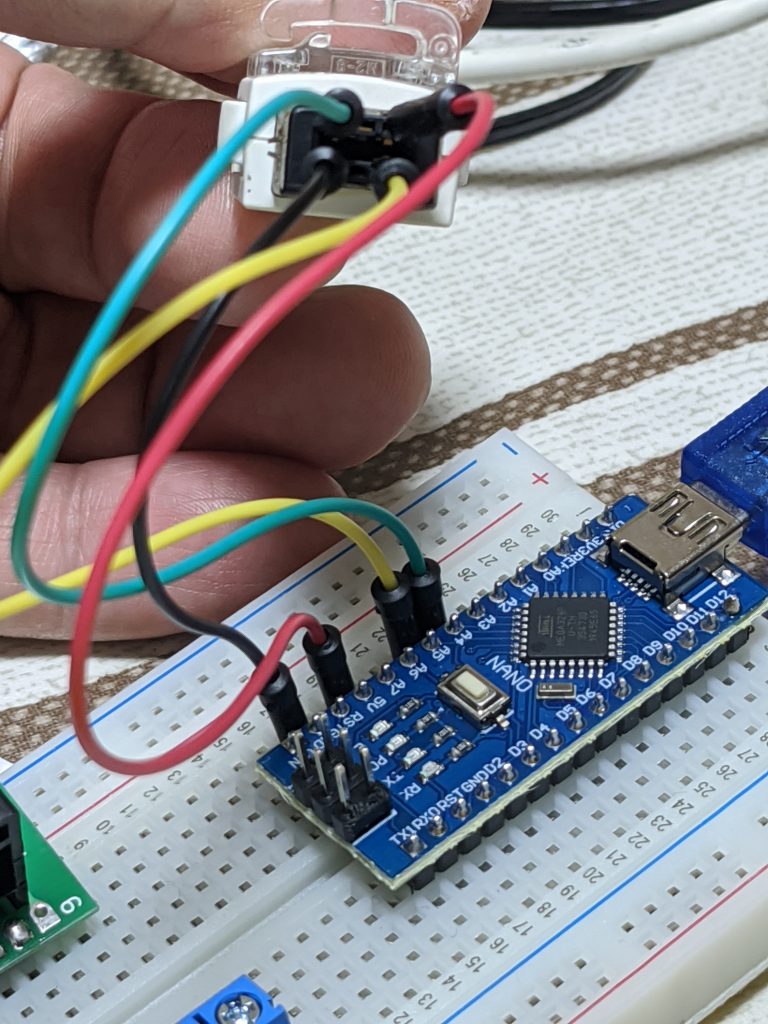
ヌンチャク本体側には赤、黒、黄、緑、白の5本が出ていますが、ケーブル内は黒を除いた4本です。(黒はシールド線につながっています)
この4本を真っすぐ、平行に並ぶように形を整えます。正規のモジュラケーブルと違って柔らかいワイヤーなので、まっすぐにしていないとコネクタにセットするときに曲がってしまってなかなか入りません。
また、後々分かりやすいように
黄色ー赤ー緑ー白
の順にすることをお勧めします。赤=電源となってミスが起きにくいです。

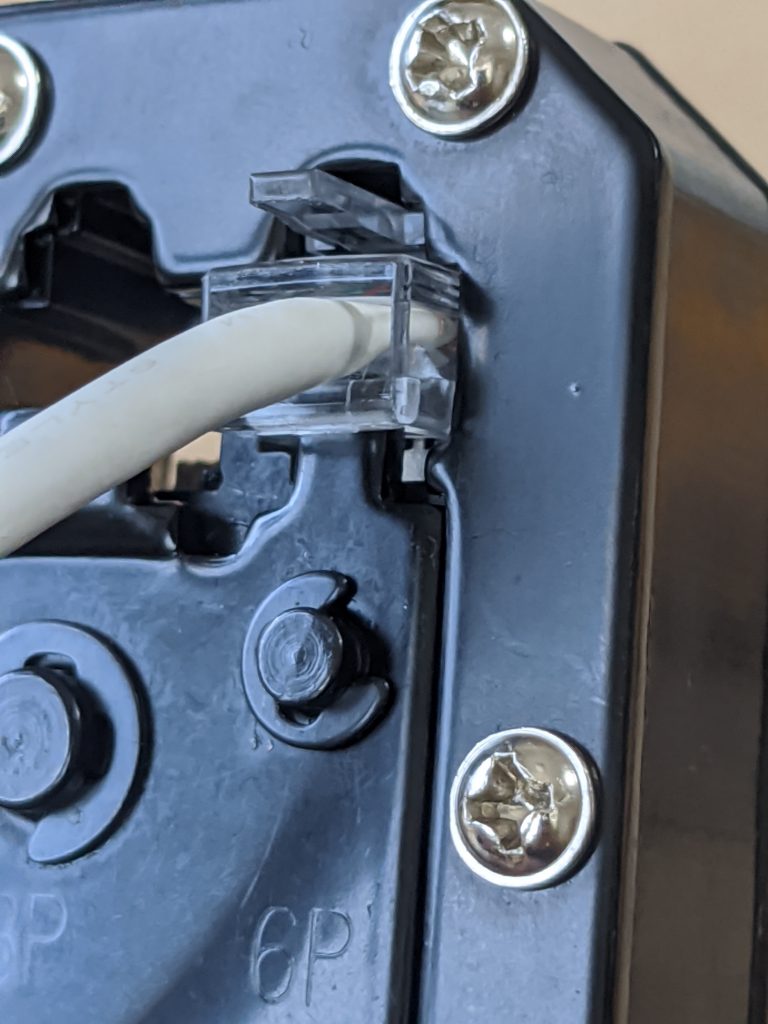
これをプラグに挿入して、モジュラ圧着ペンチで固定します。
この順序で以下のようになっています。
黄 (AZ GTiの)Tx
赤 DC12V
緑(AZ GTiの)Rx
白 Gnd
順序は変わってもよいですが、後の手順で間違えないようにしてください。
なお、ヌンチャクを正規品ではなくコピー品を使う場合、ケーブルの色はまちまちなので、カットする前に必ずテスターで確かめるなどして間違えないようにします。

ちなみにAZ GTiのハンドコントローラポートのピンアサインはこのように書かれています。
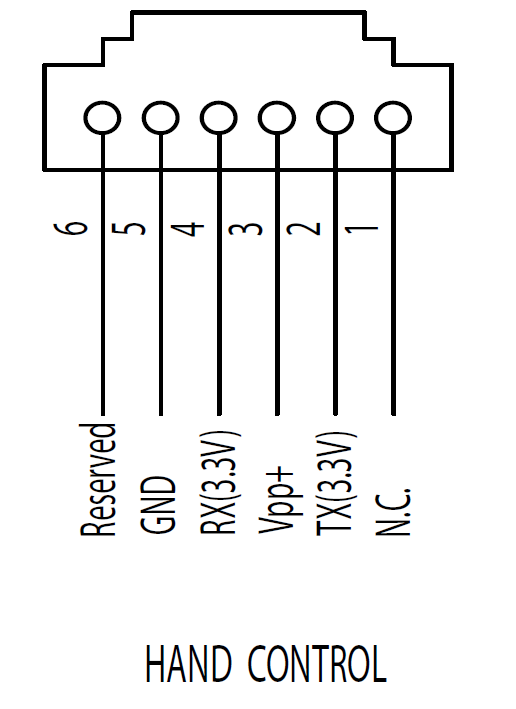
出典:AZ GTi Instruction Manual V102 Page 8
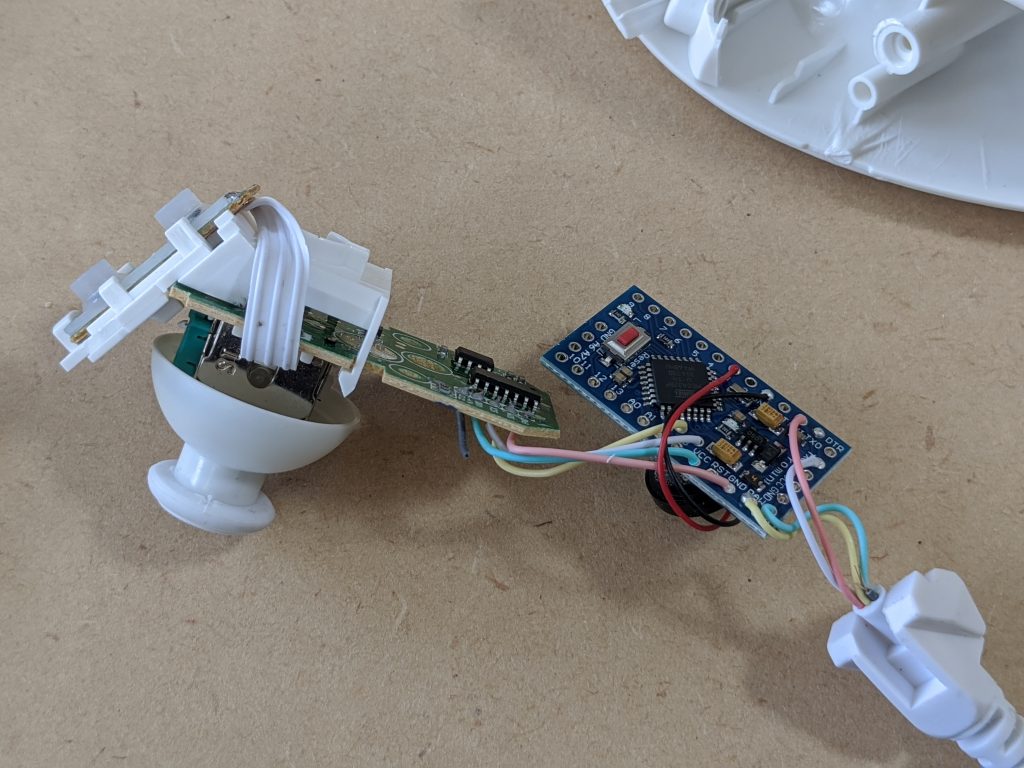
本体側のはんだ付け
ヌンチャクからケーブルと基板を外します。
次にワイヤーをほぼ中央になるようにカットします。
あまりどちらかに偏って切ってしまうと、基板がうまく入らないことになります。
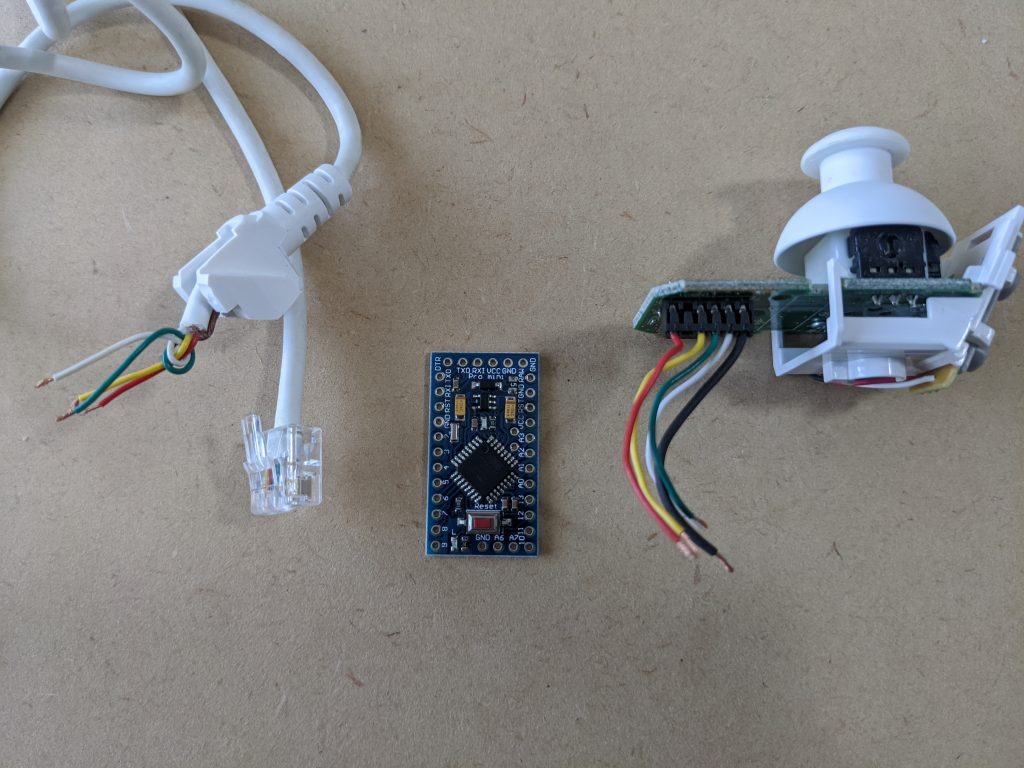
これをArduinoに直接ハンダ付けします。(ピンヘッダを使うとケースに入らなくなってしまうので)
配線は以下の通りです。
今回のスケッチでは、圧電ブザーは3番ピンにアサインしています。
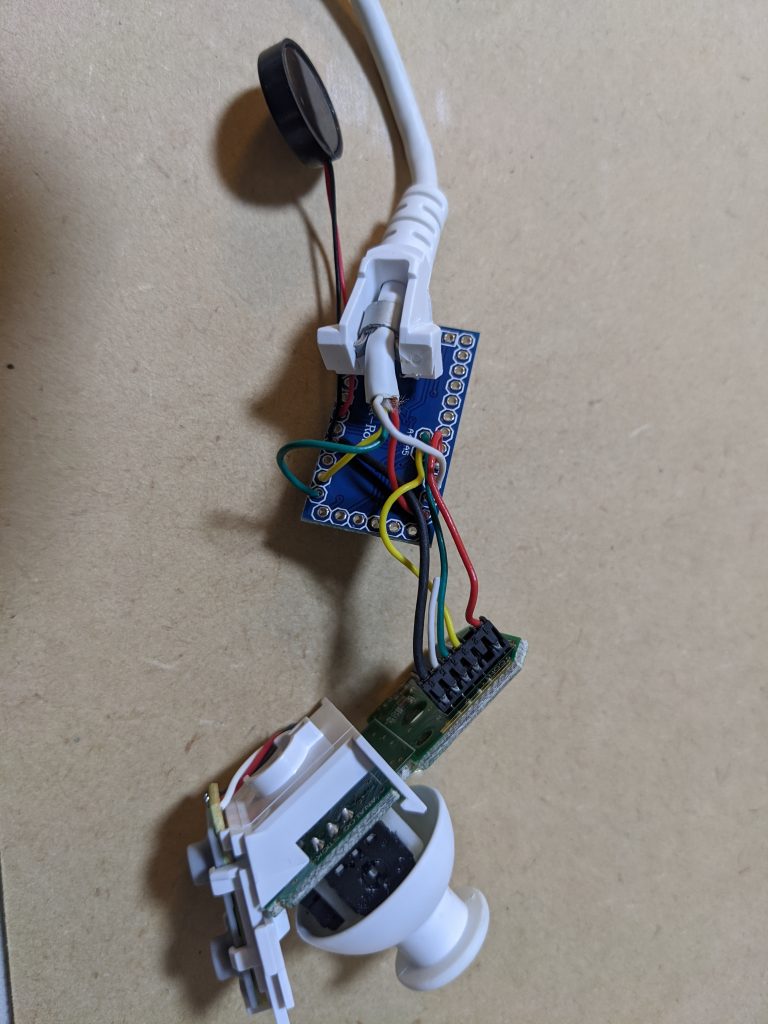
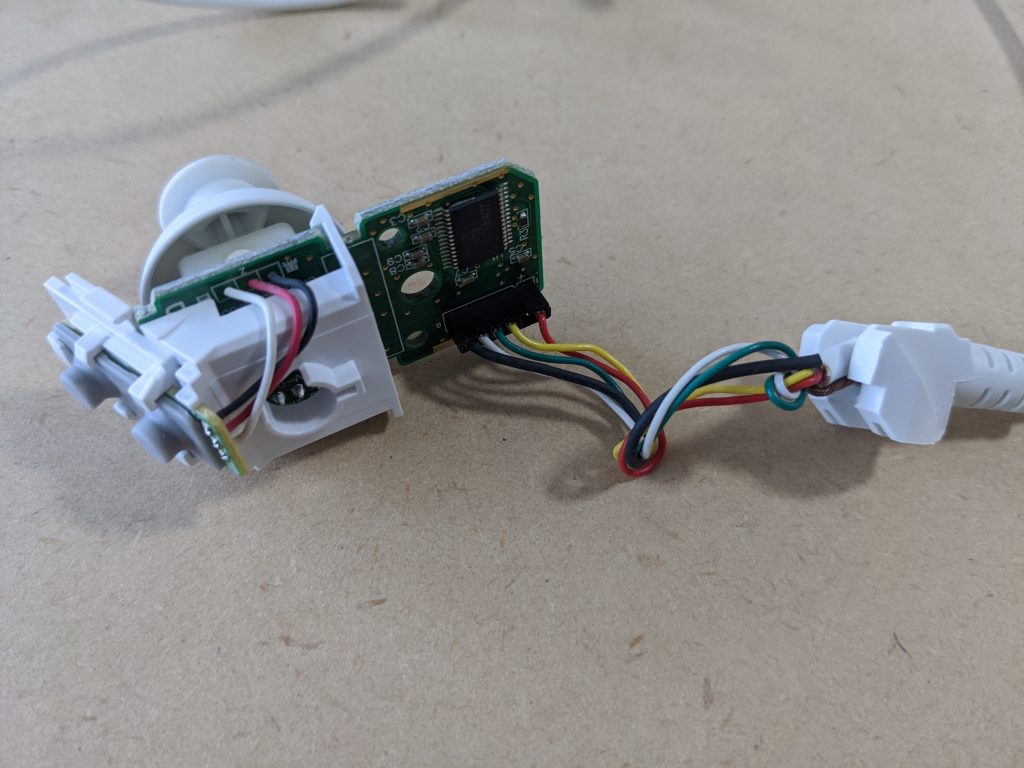
上記の写真は実は失敗例です。ジョイスティック側のワイヤーが、コネクタ側のワイヤーの束の中をくぐってしまってます。それぞれの束は完全に分離できるほうが、ケース内に基盤を配置するときの自由度が上がります。

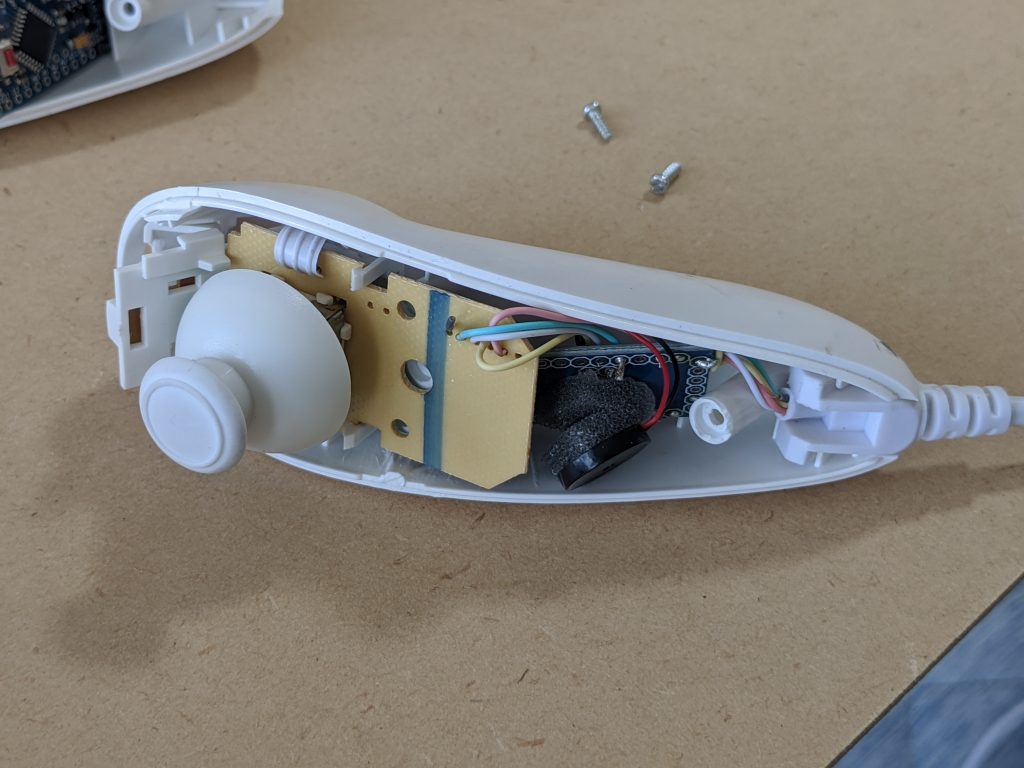
基板が中でカタカタしないよう、タカチの難燃性スポンジ付き両面テープで基板が当たる場所をカバーします。
ケーブルのブーツをはめて、次にArduinoを入れ、最後にヌンチャクの基盤をいれると、入りやすいです。配線が絡まっておらず、極端に短い配線が無い限り、Auduinoの入る余裕はたっぷりあります。
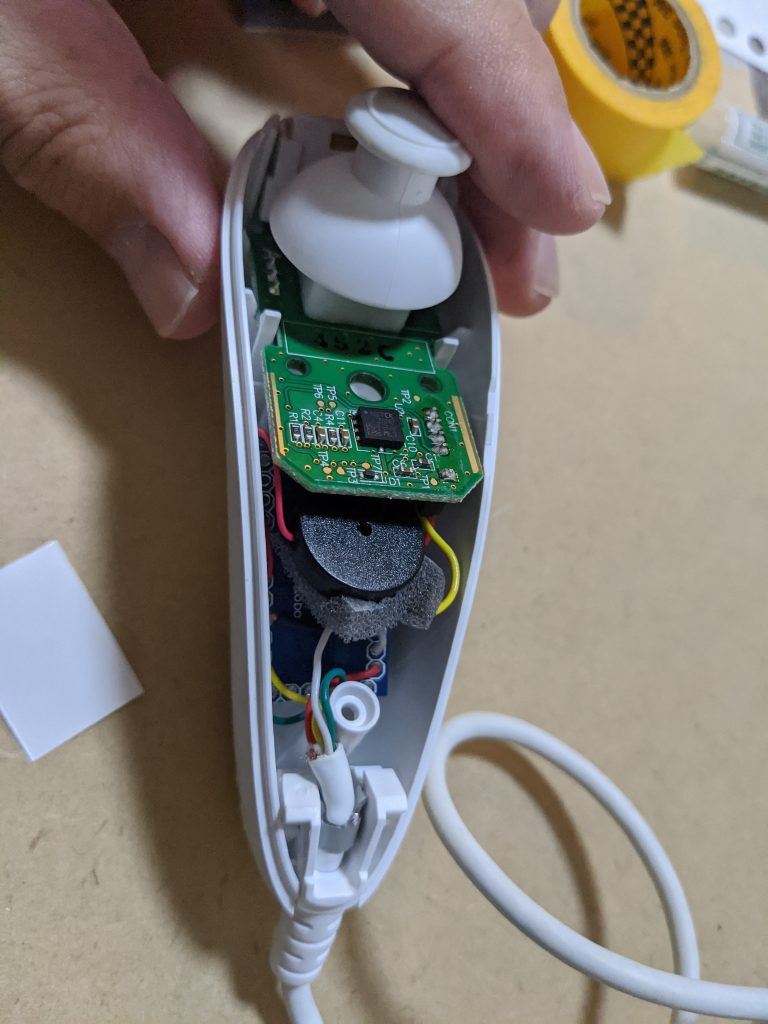
最後にブザーと基板を同様にスポンジ付き両面テープで動かないように押さえます
これで蓋をしめれば完成です。

任天堂正規品でない場合の注意点
筐体内部のケーブルが非常に短いので、うまく調整しないと入らない。あらかじめ配置を考えてからカットするか、ワイヤーを伸ばすかしたほうが無難です。
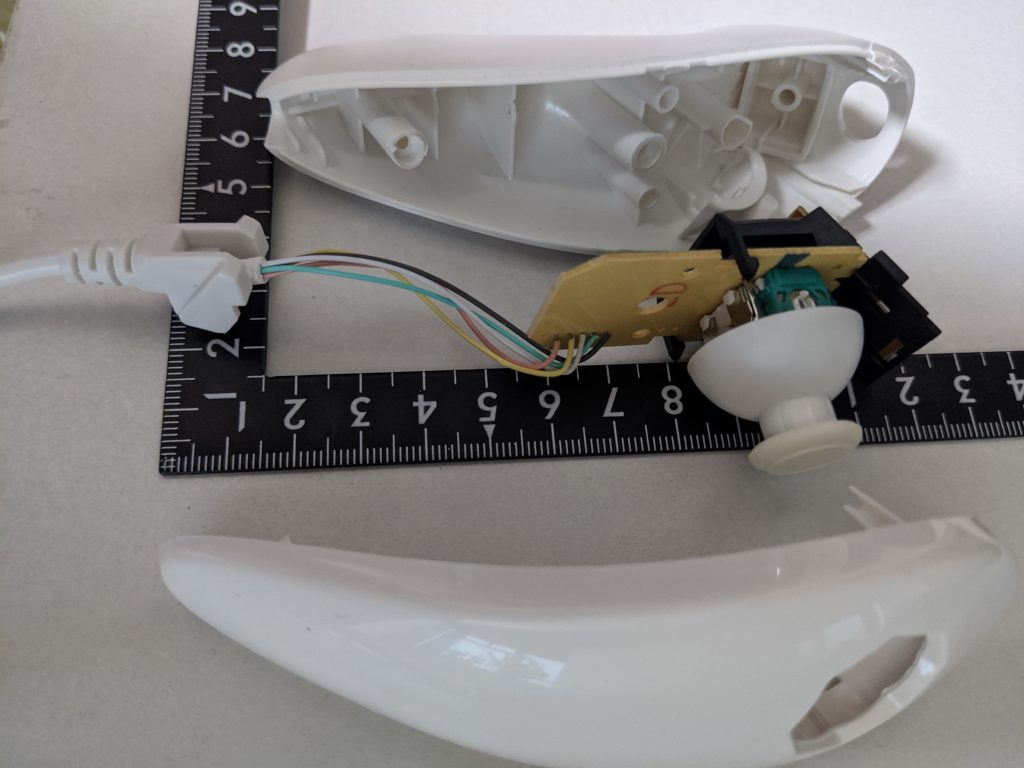
また、どの色のワイヤーが どの信号のものか、あらかじめテスター等で確認しておく必要があります。

それぞれがジョイスティック基板のどこと接続されているか、コネクタを切断してしまう前に導通確認してください。
また互換品は正規品と違ってシールド線がありません。まあ、改造してここを通るのはもはやI2C通信ではなくシリアル通信となるので、問題はないのですが。。
また互換品は何種類も買って調べましたがケーブルとブーツがどれも溶着されていました。正規品ではれば、ケーブルを抜いて、例えば別のモジュラケーブルを差し替えて使うとかもできそうです。

互換品をAZ GTi対応に改造したもの
開発裏話
任天堂ヌンチャクにたどり着くまで、ジョイスティクと上下左右にボタンが付いたものを作ってみたり、タカチのケースにジョイスティックを付けてヌンチャクもどきをつくってみたりいろいろしてみたけど、やはり任天堂ヌンチャクが一番使いやすい。この形は意匠特許がでていたはずで、さすが、握りやすい。
そこで任天堂ヌンチャクを使う方向で決定して、最初は間に挟むコネクタ型で試作してみた。
こちらは試作品達。ヌンチャクとの間に挟むコネクタ型。
ただ、どうしてもケースが間にぶらぶらするのが嫌で、なんとかヌンチャク本体のみで完結できるように模索開始。
まず、ヌンチャクの本体の隙間が非常に小さい。海外でヌンチャクの改造記事がいくつかあったけど、マイコンを入れるのに筐体の内側を削るなどしていた。あまり物理的な加工はしたくない。。。
そこで、
・直接DC12Vで動く
・3.3Vか5Vでシリアル通信ができる
・I2C通信ができる(ヌンチャクとはI2C通信)
を条件にマイコンを物色。
そこで見つけた親指大のこのArduinoを見つけて取り掛かる。
https://www.iot-experiments.com/attiny85-development-board/
ちょっと特殊なところがある(int a=0; とか、宣言で初期化をやるとエラーになるなど。。。)けど、なんとかコーディング。スケッチの焼き方もちょっと特殊。
で、焼こうとすると、使えるメモリが小さすぎて、スケッチが入りきらない!!SkyWatcherのモータープロトコル対応でちょっと大きくなってしまったからなあ。。
コード書く時にテストで使ってたArduino nano だと長すぎて入らない。。
そこで探してきたのが Arduino Pro Mini
これだとヌンチャク内部に入れれるし、入れる方法も何通りもあった!
というわけで Arduino Pro Miniに決定した。
あと、ヌンチャクは任天堂の正規品と、AliExpress等で売ってる互換品(激安)がある。
互換品は安いけど、次の3つの理由で正規版を使うことを推奨。中古だと安いし。
・互換品はヌンチャク内部のケーブルワイヤーが短い。うまく配分してカットしないと、はんだ付けした基盤が入らない(失敗多数)
・互換品はケーブルブーツとケーブルが接着されてしまっている。失敗したときに「買ってきたモジュラケーブルに差し替え」というリカバリーがやりにくい
・4種類くらい、計20個くらい買ったけど、そのうち数個、ジョイスティックを動かすと「0~255」にならないといけないところが「254,255、0、1、~253」とか「3、4~255、0,1,2」とずれているものがあって、上限/下限まで動かすと反対の動作になったりした。
(一応、これでも動くように対応してある)
使い勝手について
やはり自分が使いたいものを作ったので、とても使いやすくて、よいです。
特に赤道儀モードにしたときは、ヌンチャク自体が追尾指令を出すので、SyncScanAppがなくても動きます。
アプリは自動導入したいときだけ使う感じで、後は切ってます。ISSの日面通過撮影などはヌンチャクを太陽追尾モードにしておいて、アプリは全く使わなくなりました。
分かってる不具合
SyncScanAppが送っているコマンドはモーター制御コマンドです。ヌンチャクもモーター制御コマンドを送っています。
まれに、同時にコマンドを送ると、AZ GTiのモータがハングアップして、電源入れ直し(とアライメントやり直し)が必要になってしまいます。
特にアプリから
・経緯台モードで追尾している時
・赤経・赤緯などリアルタイム情報表示をしている時
はアプリからほぼ1秒おきにコマンドが送られています。この時にヌンチャクを操作するとバッティングする可能性が高いです。
ヌンチャクを使う時は
・アプリの追尾はOFFで
・アプリの情報表示はOFFで
・アプリのボタンで操作中はヌンチャクの操作をしない、逆も同じ
・Gotoで目標導入中はヌンチャクの操作をしない
これらさえ気を付ければ問題なく使えます。
余った部品セット、あります
ちなみに改造に必要な部品(余ったもの)が5セットあったので、ヤフオクに出してみます。Arduinoはプログラム済みです。よかったら工作に挑戦してみてください。
売り切れました。
はじめまして。
さっそく作ってみようと部品調達はじめました。
ArduinoのスケッチをDLしたのですが、Axis.cpp の #include “Float64.h” が No such file or directory
となります。
ArduinoはOnsteoで試行錯誤中の 超初心者ですが、 対処方法を教えていただけないでしょうか。
コメントありがとうございます。
スケッチメニュ⇒ライブラリをインクルード でFloat64が出てきませんか?
メニューに出てくれば、それを選んでみてください。
私の環境では出てきて、実態ファイルはArduinoアプリのインストールフォルダ(例:C:\Program Files (x86)\Arduino\libraries\Float64)に入っていました。
もし無い場合はこちらに上げておきますので、使っていただいてもいいですが、ツールのライブラリマネージャから入れるほうが良いと思います。
https://drive.google.com/file/d/195B4wDDlrdIuPrdDENV_GD5E8vhFz325/view?usp=sharing
ありがとうございます。
ライブラリになかったので、アップしていただいたフォルダデータを、Arduinoフォルダにコピーしてから、
ライブラリマネージャーでインストールしました。
おかげさまで、エラーがでなくなりました。
部品がとどきましたら、製作にとりかかろうと思います。
ありがとうございました。
ありがとうございます。ヌンチャクコントローラーの記事、大変参考になりました。
ところで1つお聞きしたいのですが、移動速度がコントロ-ラーでは0~6となっているのは何か理由があるのでしょうか?
Synscanの方は9まで上げられるので・・・・
初めまして。メキシコ在住のAZ-GTi使用ユーザーです。AZ NUNCHUKとても便利だと思いまして、早速制作を始めさせて頂きました。ありがとう御座います。
ところで、使用した機材は、純正のNUNCHAKU 及び NAO様と同じArduino pro miniを使いましたが、FT232RLを使った場合にはスクラッチが書き込めないので、Arduino UnoをArduino as ISPとして、まずブートローダを書き込みまして、次にスケッチの書き込み装置を使ってスケッチの書き込みが最後まで完了出来ました。
これで、ハードウェア結線を完了しまして、HAND CONTROL端子に挿しましたが、NUNCHAKUが動作しませんでした。
電源ON後のArduino pro miniの動作としましては、ボード中央の緑のLEDが一瞬点灯して消えます。ジョイスティックを動かしても、LEDの点灯はありません。ボード上のRAW端子(12V)横のダイオードはかなり熱くなっています。また、ジョイスティックボードのVCC端子には、3.3Vや5Vの電圧はかかっておりません。
基本的な質問で申し訳ないのですが、アドバイスを頂けますと助かります。
よろしくお願い致します。
コメント、どうもありがとうございます。
ダイオードが熱くなっているとのことなので、もしかすると電源ICが壊れたのかもしれません。
Arduino Pro Mini はSwitchScienceの正規品は入力20V くらいまで大丈夫なのですが、コピー品は入力電源ICが12V 仕様のものがほとんどで、耐圧も低めです、
AZGTiを乾電池で使う場合、電池が新品だと8本で14Vくらいかかることがあり、たまに電源ICが壊れます。
(12V以下のACアダプタや、少し減った電池では大丈夫)
簡単な回避策としては、12Vの電源ラインに300Ωくらいの抵抗を挟めば、確実に12V以下に落ちます。一度試してみてください。
アドバイスありがとう御座います。
電源ラインに330Ωを入れて確認しましたが、電圧が2V近くまで下がってしまいまして、電圧を上げる為に同一抵抗値の抵抗を並列に入れて見ましたが、同様に2V近くまで下がってしまいました。
ヌンチャクの基板については、コネクターの配線色も同じでコード固定金具もついていることからNAO様と同じVerのヌンチャク基板だと思い込んでいましたが、良く基板を見てみますとフラットパッケージICの向きが異なっておりました。
それなので、Arduino pro miniのヌンチャク基板接続側の配線を外しましたら、電源接続で圧電ブザーがメロディを奏でました。
先に作ったArduino pro miniも二つ目に作ったArduino pro miniもメロディを奏でるので壊れていない様です。
電源ラインへ電流制限抵抗を入れても、電圧が規定通りに落ちなかったので、安定化電源基板を使って、電圧を4Vまで下げてArduino pro miniの確認をした時に、ヌンチャク基板側のフラットパッケージICが熱くなってしまっているので、ヌンチャク基板側のICが壊れているように思われます。
いま別のヌンチャクが12日までには到着すると思いますので、ヌンチャクが届いたら、Arduino pro miniとつないで確認してみます。
今度は、事前にヌンチャクの端子と配線色を事前に十分確認してから半田付をしようと思います。
ヌンチャク基板側の配線を外した状態では、電源ラインに330Ω挿入で12V印可で7.5Vになっております。
アドバイスありがとう御座いました。
NAO様。お陰様で、新しいヌンチャクを使って、問題なく上下左右動作させることが出来ました。
アドバイスありがとう御座いました。
ご報告まで。
初めまして。スケッチの書き込みで、
#inklude “pt.h” でエラーとなり、そのようなファイルまたはディレクトリはありません となります。
すみませんがアドバイスお願いいたします。初心者ですみません。
コメントありがとうございます。
Arduinoアプリで ツール→ライブラリを管理を選び、検索窓に「protothreads」と入力します。
そうするとProtothreads というものが現れるので、「インストール」ボタンを押してライブラリをインストールします。
それから、スケッチ→ライブラリをインクルード を選び、Protothreadsがリストに出てくるので、それを選びます。
それでライブラリが組み込まれ、エラーが出なくなると思います。
返信ありがとうございます。今度はstray’\343′ in program というエラーが出ます。
541ビープ音の場所で止まります。
そのエラーはプログラム中に日本語や不正な文字が混じってい時が多いです。
おそらく、「全角スペース」が混じっていませんか?
ぱっと見で分かりにくいので「全角スペース」を「半角スペース」に一括置換すれば解消するかと思います。
無事、書き込み出来ました。本当にありがとうございました。
お世話になります。
AZ-GTiのハンドコントローラーを自作したくてこのサイトへたどり着きました。
純正のヌンチャクと互換 Arduino Pro Mini(5V版)の組み合わせでやっていますが、うまく動きません。(Arduino IDEはWindowsStore版1.8.57)
①AZ-GTiは赤道儀モード対応のfirmwareにしていますが、接続し電源をいれても「ビープ音が継続的に鳴る」になりません。
10秒後くらいに「ピッ」とビープがなるだけです。
ちなみに、AZヌンチャクをAZ-GTiから外して、5Vの電源をつなぐと10秒後くらいに連続したビープが鳴ります。
②ヌンチャクを触らない状態だと恒星時ガイド信号が出ているはずなのにAZ-GTiが回転する音が聞こえません。
SynScapアプリで恒星時同期をONにすると回転する音が聞こえます。
③ヌンチャクのコントローラーでの回転は縦・横どちらも回転します。
また、CとZのボタンでスピードも変化します。
④Arduino IDEでのコンパイルの際に以下のようなメッセージ(赤字)が大量にでます。
D:\temp\WiiNunchuk4AZGTi\WiiNunchuk4AZGTi.ino: In function ‘bool SendReceiveMsg(char*, char*, int)’:
D:\temp\WiiNunchuk4AZGTi\WiiNunchuk4AZGTi.ino:63:20: warning: ISO C++ forbids converting a string constant to ‘char*’ [-Wwrite-strings]
debug(“TIMEOUT”);
^
D:\temp\WiiNunchuk4AZGTi\WiiNunchuk4AZGTi.ino: In function ‘int threadX(pt*)’:
D:\temp\WiiNunchuk4AZGTi\WiiNunchuk4AZGTi.ino:86:32: warning: jump to case label [-fpermissive]
PT_SEM_WAIT(pt1, &mutex);
^
D:\temp\WiiNunchuk4AZGTi\WiiNunchuk4AZGTi.ino:85:14: note: crosses initialization of ‘bool ret’
bool ret=false;
^~~
D:\temp\WiiNunchuk4AZGTi\WiiNunchuk4AZGTi.ino:99:36: warning: jump to case label [-fpermissive]
PT_SEM_WAIT(pt1, &mutex);
^
コンパイルは終了しボードへの書き込みは行えています。
ネットでしらべると「警告」的なもので「動作はする」とのことなので、無視していますが、この警告がキモなのかも知れません。
この辺りは全く素人なので手が出せない状態です。
なにかこの症状でお気づきのことがありましたらご教示いただけると幸いです。
コメントありがとうございます。
> ①AZ-GTiは赤道儀モード対応のfirmwareにしていますが、接続し電源をいれても「ビープ音が継続的に鳴る」になりません。
10秒後くらいに「ピッ」とビープがなるだけです。
これは赤道儀モード対応外の場合の動作に思えますが、ファームウェアアップデートされているとのことで、理由が分かりません。
> ちなみに、AZヌンチャクをAZ-GTiから外して、5Vの電源をつなぐと10秒後くらいに連続したビープが鳴ります。
これはエラー音です。
コンパイル時のワーニングは問題ないと思います。
経緯台モードでの動きは出来ているようですので、赤道儀モードの認識に問題があるかもしれません。
下記の部分のコードを少し変更してやってみて頂けますでしょうか。
————-440行目付近のコード(元のソース)————-
//Get Extended Inquire
retry=0;
while(retry <60){
if(SendReceiveMsg(":q3010000\0", response,1)){
if((response[2] & 0x08)!=0x00){
debug("Tracking mode selection....");
debugln();
//User's selection
//ここで赤道儀か経緯台を選ばせる
-------------440行目付近のコード(このように変更してみてください)-------------
//Get Extended Inquire
retry=0;
while(retry <60){
if(true){//とりあえず無条件でモード選択
if(true){//とりあえず無条件でモード選択
debug("Tracking mode selection....");
debugln();
//User's selection
//ここで赤道儀か経緯台を選ばせる
お世話になります。
さっそく、ご指示通りコードを書き換えてArduino Pro Miniに書き込みました。
結果は大成功です。
電源を入れて5秒ほどで「高度なオプション」にある「経緯台・赤道儀モード」の待機状態で間欠のビープが鳴り始めます。
レバーの左右操作でメロディが流ます。
恒星時駆動のモーター音もしています。
今夜は晴れそうなので実環境でテストします。
無事動いたとのことで、良かったです。
最初に作ってから2年ほど経過しているので、今の仕様と合わないところが発生しているのかもしれません。
時間のある時にAZGTiとの通信を再度確認してみます。
コメントでご報告頂き、どうもありがとうございました。
早速のお返事ありがとうございます。
なるほど、AZ-GTiのファームウエアのアップデートからみの可能性ですか。
考えつきませんでした。
早速、ソースファイルを変更して試してみます。
お忙しい中ありがとうございました。
逐次レポートします。
Nao様、 AZ-GTiのスマホでの操作が不便で、コントローラーを造りたく貴サイトにたどり着き興味を持ちました。が、 Arduinoには不慣れなため、ずっとためらったていたのですが思い切って参考書を読み、部品を集めて取り掛かり始めました。いざ、このGitHubにあるスケッチのIDEへの書き込みになると参考書にも詳しい説明がなく間違ってもいけないと戸惑っています。
基本的なことで恐縮なのですが下記につきアドバイス頂けると幸いです;
① 一番上にあるUpdateファイル含め、これらすべて(14ファイル)をコピーし順次に書き込むので良いでしょうか
② それとも、”Add file via Upload”と”Update XXX” と注記のあるものを選択して書き込むべきなのでしょうか
Arduinoは初心者の過分なチャレンジで、稚拙な質問をすることをご容赦ください。
コメントありがとうございます。
ArduinoIDEを使います。ここからダウンロードできます。
https://www.arduino.cc/en/software
WiiNunchuk4AZGTi という名前のフォルダを作り、そこにすべてのファイルをダウンロードしてください。
ArduinoIDE がインストールされていれば WiiNunchuk4AZGTi.ino を開くと、ArduinoIDEが起動します。
「ツール」⇒「ボード」でお使いのボードを選んで
「スケッチ」⇒「マイコンボード」の書き込む
で書き込めます。
最初は足りないライブラリ等があるとエラーが出るかもしれません。
どうぞよろしくお願いします。
追記です。
GitHub画面右上方、緑色の「Code」ボタンから「Download ZIP」を選べば、コードをすべてダウンロードできます。
Nao様
早速のご返答ありがとうございます!
なるほど。。。やってみます。
取り急ぎお礼まで。
アドバイス頂いたようにやってIDEにはダウンロードされました。ただ、書き込みをするとFloat64.hというファイルがない (Axis.cpp:19:10: fatal error: Float64.h: No such file or directory)とのエラーが出て止まります。前の方の質問へのご回答を見て、
「protothreads」のインクルードもしてみましたが(正しいかどうかわかりませんが) 状況はかわりません。
恐縮ですがアドバイス頂けると幸いです。
Float64が無いというのは、結構あるみたいですね。過去コメントにもあったので引用しますね。
protothreadsは必要です。
よろしくお願いします。
—————————-
スケッチメニュ⇒ライブラリをインクルード でFloat64が出てきませんか?
メニューに出てくれば、それを選んでみてください。
私の環境では出てきて、実態ファイルはArduinoアプリのインストールフォルダ(例:C:\Program Files (x86)\Arduino\libraries\Float64)に入っていました。
もし無い場合はこちらに上げておきますので、使っていただいてもいいですが、ツールのライブラリマネージャから入れるほうが良いと思います。
https://drive.google.com/file/d/195B4wDDlrdIuPrdDENV_GD5E8vhFz325/view?usp=sharing
ありがとうございます。前の質問を見逃していて失礼しました。
Float64はライブラリーには無かったので頂いたものをコピーして「ファイルを追加」し、その後、Softfloatも「ない」として停止したのでそれも同様に追加して書き込みをしたところ、無事「書き込み終了」となりました。この後、Wiiヌンチャクの結線などをして組み立ててみます。お手数をおかけしました。ほんとうにありがとうございます!
うまくいったようで良かったです。
もし赤道儀モードでうまく動かないようであれば4/4のコメントを参考にしてください。
アドバイスに沿い、無事製作完了しました。経緯台として面積の大きい太陽の各部を太陽望遠鏡を微細に動かしてみる目的でしたが、さきほど試行してその目的がかないました。とても便利です。 ありがとうございます!
ただ、説明とやや異なる点として、①スティックの2段階の動かし方で速度は変わらない(かなりゆっくりのままです)② Up/Downボタンでの速度切り替えが2段階のみのよう(微速と超微速)ということがあります。(Synscanでのレベル2程度)私の読解力不足でもともとそういう仕様か、それともスケッチ書き込みにまだ不備があったのかなとも思います。 でも、導入には遅すぎますが 一旦視野に入れた後の微調整には良いのでおおいに
満足しています。 初心者の度重なる質問に丁寧に答えてくださりありがとうございました。 NAOさんに感謝しつつ、AZ NUNCHAKU活用します!
そうですか!動いてよかったです。
速度はSynScanAppのステップでいうと5までにしています。
それ以上だと加速・減速の制御を入れるべきで、ちょっと面倒なので、単純なON/OFFで動かせる範囲に絞っています。
プログラム中の上限値を上げればステップ6以上も可能ですが、SkyWatcherの仕様想定外になりますし、重いものを載せているとギアに負担がかかるかもしれません。
スティックの動かし方2段階はステップが1つあがるだけですので、低速域だと分かりにくいかもしれません。
Naoさま、
補足の情報をありがとうございます。
3日間連続で太陽観測・撮影に利用していますが格段の便利さです!
特にカメラの画角内での中の位置調整が楽になりました。
たしかに、スピードについてはおっしゃる通りで、全く問題なく、むしろ快適でした。
(前言のコメント早とちりでした)よく考えられていますね。
どこかの社で製品化されないのが不思議なくらいです。
ともかく、感謝しています!
今後もご活躍ください。
NAO様 貴重な製作記事感謝いたします。ヌンチャック愛用させていただいております。AZ-GTiのファームの更新(?)に伴い、一時使えなくなっていましたが、4月4日のパッチで解決しました。ありがとうございます。私はAZ-GTi(ファーム3.39最新)、SyncScanPro、EQモード、ASCOM経由でステラナビゲータ,PHD2ガイディングという構成で使用しています。ヌンチャックは主鏡とファインダーの視野の同期で、大変重宝しております。大きな問題ではありませんが、後からヌンチャックをハンドルコントローラポートに接続した時、不用意な赤経移動が生じます。AruduinoProMiniのオリジナルは中華製に比べ非常に高価なっています。中華製は搭載の三端子の入力電圧が9V(オリジナルは20V)でも壊れるものがあり、ヌンチャックのジョイスティックICを壊してしまった経験から、3mm角の高耐圧の極小の3.3V三端子を使っております。今後とも宜しくお願いいいたします。まずはご報告まで
ご報告どうもありがとうございます!
>後からヌンチャックをハンドルコントローラポートに接続した時、不用意な赤経移動が生じます。
これはおそらくEQモードと判定してX1速度で動かそうとしたのだと思います。
ProMiniのコピー品は13Vで壊れるものがあること、だいぶ後から分かりました。
最初はそれが分からず、新品の単三電池8本(14Vくらい)の時、沢山壊してしまったものです。
9Vでダメなものもあるのですね。仕様が12Vなのでせめて12Vは壊れないでほしいですよね。。
初めまして、ヌンチャクコントローラーもarduinoも初めて聞くおじいです。ケーブルのハンダ付けぐらいしかできない私ですが、なんとかarduinoボードにスケッチできたところです。勝手にソフトを使わせていただいております。楽しみができました。ありがとうございました。
メッセージありがとうございます。何かありましたらお気軽にメッセージください。
初めまして、この記事に興味を持ち早速製作に取り掛かりました。配線の質問ですが、arduino mini とヌンチャク本体基板との配線⑤GND(黒線)が配線図下の写真では配線図とは反対側に繋がれていますが、これは意図的なものでしようか?
又、④GND(白線)は繋がなくても良いのでしようか?
メッセ―ジありがとうございます。
たしかに図とは反対側に繋いでいますね。失礼しました。
ArduinoのGNDはいくつかあるので、どこに繋いでも良いです。
ヌンチャク側のGND(白線)はつないでいません。
早速の回答有難う御座いました。これで迷いなく製作を進められます。また行き詰った時にはお世話になるかと思いますがその節は宜しくお願いします。
NAO様 お久しぶりです。ヌンチャックはAZ-GTiユーザには必須のアイテムですね、以前申し上げた4月4日のパッチ適用状態で快適に使用させていただいております。最近焦点距離が300mmのレンズ使用時気づいたこと報告させていただきます。多分パッチを適用以降の本体のファームの更新(3.4)が原因と思われますが、日周運動時、ヌンチャクで何も操作をしない状態で、恒星が日周運動とは逆の方向に移動します、ヌンチャックを引き抜くと恒星は止まります。アプリのSyncScanProで赤経駆動周波数を調整すれば対処できそうですが、どうもAZ-GTiにはこの機能は適用されないようです。
失礼します。私のVIRTUOSO GTiにもジョイスティックを付けたいと考え、検索したところNAOさんのこのサイトにたどり着きました。興味深く読ませていただきました。早速、ヌンチャクを作製しようと材料を揃えました。
ただ、一つ疑問が出てしまいました。11枚目の1024×517.pngの中で、左側①TXとArduino mini pro のRX, ③RXとArduino mini pro のTXを配線していますが、これは送り手と受け手でクロスさせているということなのでしょうか? 初心者が混乱しております。申し訳ないですが教えてやってください。よろしくお願いします。
コメントありがとうございます。はい、互いのTX(送信)とRX(受信)を接続しますので、クロスさせることになります。
なお、このサイトも作ったきりアップデートしてませんが、SkyWatcherの新しいファームウェアだと、動かないかもしれません。
新しいファームウェアでは一部の通信メッセージのサイズが大きくなっているのですが、この頃作ったプログラムの通信メッセージのバッファが小さいままなので、対応できないです。
時間ある時に検証してみますが、もし動かなかったらお知らせください。
ご回答有難うございます。そうですね、思い出しました。シリアル通信でしたね。もう70になりましたのでなかなか以前のの取り組みを思い出せません(^^;) 「SkyWatcherの新しいファームウェアだと動かないかも…」 やってみます、有難うございました。
ハードは作成できました。ソフトも書き込むことができました。しかし、残念なことに動作しませんでした(^^;) スケッチのどのあたりの修正が必要になるのでしょうか? 何か情報があればご教授ください、時間をかけて取り組んでみたいと思いますので。よろしくお願いいたします。
スケッチ、時間あるときに見直してみます。
debugの使い方が分からないので、Serial.printをdebug前後に追加してシリアルモニタで表示される値を見ていましたら、いつの間にか方位軸モーターがAZヌンチャクでコントロールできるようになっていました(^^)/ 理屈は不明です… このスケッチを保存して、高度軸が動くようにチャレンジしてみたいと思います。
AZ_GTiの記事ですが、VIRTUOSO_GTiでもいけるだろうと楽観的に考えてましたが、大丈夫なようですね。
ソースを見直す時間が取れてなくてすみません。
printを入れて動くようになったのであれば、printがdelayをかけたような効果になったのかもしれません。
VIRTUOSO_GTi で使えるかどうかは分かりませんが、(AZ-GTi用の固定パラメータではなく)
SkyWatcherの通信仕様書どおりに取得したパラメータを使っているので、おそらく動くかと思います。
有難うございます。動く時もあれば、動かない時もあります。かなり不安定です。delayで試行錯誤してみます。
AZヌンチャクはギブアップです(^^;) Sky-Watcher の モータープロトコル解説を拝読させていただいて、M5Stackのジョイスティックでやってみました。どうにか必要な動作だけはできそうなので、この方向で進む予定です。有難うございました。
https://x.com/i/status/1884818610151158052
松田様
お力になれずにすみません。
一つ分かっているのは、プロトコルは複数からの同時入力があると架台側がハングアップししますので注意してください。
特に経緯台モードで追尾にしていると、SynScanアプリから頻繁にモーターへコマンドが送られているので、別コントローラからコマンドを送るとバッティングしやすいです。
コントローラを使うときは一時的に追尾を切ることをお勧めします。
一番良いのは
SynScanアプリ⇒コントローラ⇒架台
と接続して、コントローラで手動操作するときはアプリからの通信を止める、という切替ができれば良いです。
自分で作ろうと思いながらなかなかまとまった時間がとれず、手を付けられずにいます。
有難うございます(^^)/
NAOさんの「Sky-Watcher の モータープロトコル解説」で勉強させてもらってます。
ようやく時間が取れました。
やはり受信領域の長さが足りなかったです。
ファイル「WiiNunchuk4AZGTi.ino」の420行目
char response[10];
を
char response[100];
に変更して、動くようになりました。
Githubのコードも近いうちに更新します。
遅くなりまして申し訳ありません。