AZヌンチャクをEQ6で使う話があって、EQ6の通信ログをもらいました。
EQ6を壊してしまうといけないので、今年(2020年)1月~2月にかけてプロトコルを解析した資料があったので、復習がてら整理して載せることにしました。
万人の役に立つ情報ではないですが、なにせ本家のドキュメントがあまりにも不親切なので、必要な人には役に立つかなと思います。
(このサイトは2か国語にしてますが、このページは面倒なので日本語のみです。)
免責事項と注意点
この資料は自分の手元にあるAZ GTi(1台のみ)とPC版SyncScanProとの通信ログを解析しながら、SkyWatcher社のモータープロトコルのドキュメントを自分なりに理解したもので、当然間違っている可能性もあります。また本ページ作成時に転記間違いがあるかもしれません。
このページに掲載している情報を元にした結果のいかなる直接的、間接的損害について、当方は一切の保証は致しません。本ページ掲載情報の利用は自己責任で行ってください。
実際の作成にあたっては元にSkyWatcher社のドキュメントを正として、こちらは参考程度にして頂くようお願い致します。
基本的な情報
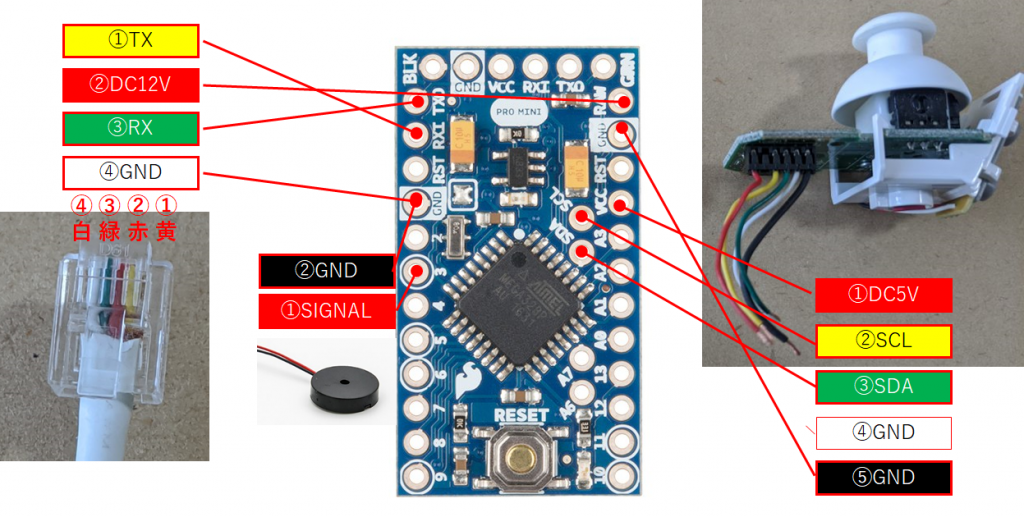
単純なシリアル通信です。ボーレート9600、データ8 bit、パリティ無し、ストップビット1、フロー制御無し。
シリアル通信の電圧は3.3Vですが5Vでも動きます。間違えてRS232Cレベルの電圧をかけると壊れてしまう可能性があるので、注意してください。
通信は文字(テキスト)によるプロトコルです。クライアント(ハンドコントローラ等)から、マウント(AZ GTiなど)にメッセージを送り、返事を受け取ります。マウント発でメッセージを送ることは(たぶん)ありません。
コマンドを送る時は 「:」 で始まるメッセージで、返事は「=」で始まります。エラーの時の返事は「!」で始まります。メッセージ終わりは全て「\r(0D)」です。
「:」の後の1文字がコマンドコード、その次の1文字が「1」か「2」でこれはAxis(軸)番号です。
接続開始時
まずはクライアント(SyncScanPro、ハンドコントローラ、ヌンチャクなど)とAZ GTiの通信開始時の通信です
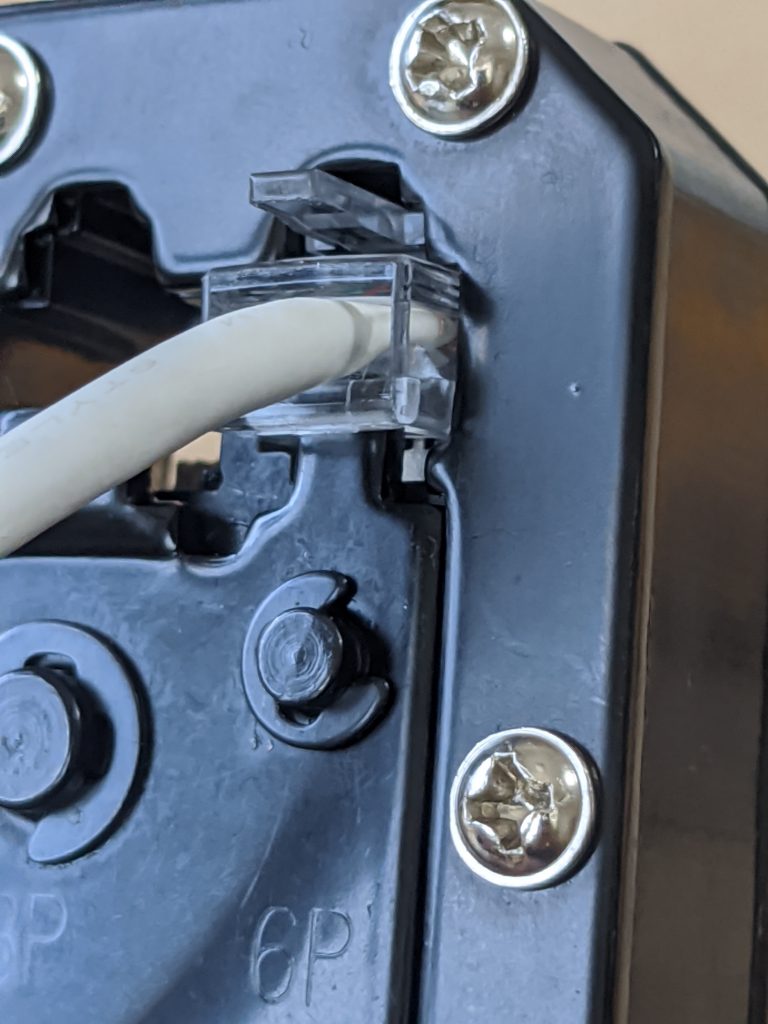
モーターボードバージョン問合せ
(–>Mountへ) :e1\r
(<–Mountから) =0314A5\r
(–>Mountへ) :e2\r
(<–Mountから) =0314A5\r
拡張情報要求 ExtendenInquire (AZGTiが赤道儀モード対応かどうか、に使ってます)
(–>Mountへ) :q1010000\r
(<–Mountから) =098000\r
拡張情報設定 ExtendedSetting(ディアルエンコーダON/OFFとか)
(–>Mountへ) :W1050000\r
(<–Mountから) =\r
(–>Mountへ) :W2050000\r
(<–Mountから) =\r
オートガイドスピード設定
(–>Mountへ) :P12\r
(<–Mountから) =\r
(–>Mountへ) :P22\r
(<–Mountから) =\r
CPR値取得 Inquire CPR
(–>Mountへ) :a1\r
(<–Mountから) =00A41F\r
(–>Mountへ) :a2\r
(<–Mountから) =00A41F\r
TI-Freq値の取得 Inquire Timer Inturpput Freq
(–>Mountへ) :b1\r
(<–Mountから) =0024F4\r
(–>Mountへ) :g1\r Inquire Highspeed Ratio
(<–Mountから) =01\r
(–>Mountへ) :g2\r Inquire Highspeed Ratio
(<–Mountから) =01\r
後々、モーターを動かすのに必要な情報は、青字で書いたそれぞれのモータのCPR値と、TI-Freqと書かれている値です。これはマウントによって異なるようで、AZGTi と EQ6では全く違う値でした。ご注意ください。
(2020/9/18 追記)
AZ-GTi ではこの値は1なので気付かなかったのですが、EQ6のログを頂いて、それを解析した結果、この値も取得が必須ということが判明しました。
ちなみにEQ6の場合、値は 0x10(=10進法で16)でした。
この値もモーターの速度計算に使います。
値のデコード
このプロトコルでの値のエンコードはリトルエンディアンです。
例えばモーター1のCPR値は
=00A41F\r
です。
これは
0x00 + 0xA4 * 256 + 0x1F * (256)^2
= 0 + 164 * 256 + 31 * 256 * 256
= 2073600
となります。
また、TI-Freq は
=0024F4\r
なので、
0x00 + 0x24 * 256 + 0xF4 * (256)^2
= 0 + 36*256 + 244 * 256*256
= 9216 + 15990784
= 16000000
となります。
モーター速度の計算
モーターの駆動速度は恒星時基準になってましたが、下記の値を使うことで太陽時、月時等に変えることができます。
1周するのに要する時間 (スケッチでは 「baseSecPR」 回転あたりの基準秒数)は
恒星時 23:56:04.091 = 86164.091(秒)
太陽時 24:00:00.000 = 86400.00(秒)
月時 23:03:39.014 = 83019.014(秒)
ここでは恒星時を例にして計算します。
コマンドで送るTI値は N 倍速で動かすとき、
TI = (1/N) * ((baseSecPR / CPR) * TMR_Freq)
また高速モードの時は
TI = (1/N) * ((baseSecPR / CPR) * TMR_Freq) * (High_Speed_Ratio)
(2020/9/18追記: AZ GTi は High_Speed_Ratio=1 なので気付かなかった)
となります。
実際は整数値に丸めて、マイナスのときは絶対値を取ります。(マイナス=逆方向のときは、別の方法で指示します。)
※ドキュメントでは上の式で 1/N とした所が N になっていて、どうやっても計算が合いません。(2020/9/18追記)
『 T1_Preset = N * TMR_Freq * 360 / Speed_DegPerSec / CPR 』(ドキュメントの式)
式を見直して実際のデータと突き合せた結果、Nは分子じゃなくて分母にくる、という結論になりました。SkyWatcher社に問い合わせてますが返事がないままです。
上記の「Nは分子じゃなくて分母じゃないか」という疑問を出したわけですが、これは私の勘違いであることが分かりました。
ドキュメントで出てくるNは、私は「N倍速駆動するとき」のNと思っていたのですが、式の中のNは「High Speed Ratio」です。
具体例
恒星時駆動 x1.0 のとき
TI = 1/1 * ((86164.091 / 2073600 ) * 16000000 = 664846.381 ≒ 664846
恒星時駆動 x0.5 のとき
TI = 1/0.5 * ((86164.091 / 2073600 ) * 16000000 = 1329692.762 ≒ 1329693
恒星時駆動 x8 のとき
TI = 1/8 * ((86164.091 / 2073600 ) * 16000000 = 83105.798 ≒ 83106
これをステップごとに表にしたものです。1桁目に若干の違いがあるのは、演算精度の問題です。
| ステップ | 倍速(N) | TI値 | 16進表記 | メッセージ |
| 0 | 0.5 | 1329691 | 144A1D | 1D4A14 |
| 1 | 1 | 664846 | 0A250E | 0E250A |
| 2 | 8 | 83106 | 0144A2 | A24401 |
| 3 | 16 | 41553 | 00A251 | 51A200 |
| 4 | 32 | 20776 | 005128 | 285100 |
| 5 | 64 | 10388 | 002894 | 942800 |
| 6 | 128 | 5194 | 00144A | 4A1400 |
| 7 | 400 | 1662 | 00067E | 7E0600 |
| 8 | 600 | 1108 | 000454 | 540400 |
| 9 | 800 | 831 | 00033F | 3F0300 |
この一連の計算の結果のTI値がモーターを動かすときの値となります。
なお、上記の表はAZ GTiの場合のもので、他のマウントの場合はCPR値及びTI-Freq値が違いますので、この表の数字をAZ GTi以外のマウントにそのまま使うと、最悪故障する可能性があります。計算はマウント毎にCPR値及びTI-Freq値を取得して、それを元に計算し直してください。
なお、マウントによってはCPRの値と TMR_Freqの値が違うため、高速で動かす場合は計算結果のTI値が小さくなりすぎることがあります。(例えばEQ6マウントで、ステップ7~9で動かす場合)
その場合、TI値をN倍します。Nは「:g」コマンドで取得した High Speed Ratio で、EQ6の場合は16ですので、出てきたTI値を16倍して使います。
ちなみに High Speed モードかどうか(TIに倍率が掛かっているか)どうかは、後述の「方向をセットする」で指示することで判断しています。
| ステップ | 倍速 | 計算した T1値 | 高速 モード | 使用するTI値 高速はx16 | 16進表記 | メッセージ |
| 0 | 0.501229 | 1237 | 1237 | 0004D5 | D50400 | |
| 1 | 1.004896 | 617 | 617 | 000269 | 690200 | |
| 2 | 8.26694 | 75 | 75 | 00004B | 4B0000 | |
| 3 | 17.22279 | 36 | 36 | 000024 | 240000 | |
| 4 | 38.75128 | 16 | 16 | 000010 | 100000 | |
| 5 | 88.57436 | 7 | 7 | 000007 | 070000 | |
| 6 | 103.3368 | 6 | 6 | 000006 | 060000 | |
| 7 | 450.924 | 1.375 | 高速 | 22 | 000016 | 160000 |
| 8 | 708.5949 | 0.875 | 高速 | 14 | 00000E | 0E0000 |
| 9 | 1102.259 | 0.5625 | 高速 | 9 | 000009 | 090000 |
(倍速数は実測データから逆算)
モータを動かす
※マニュアル操作しか扱ったことが無いので、自動導入に使われる目標をセットしての自動セット(GoTo)は分かりませんので、ここでは扱ってません。
基本
モーターを動かす基本は、次の流れです。
1.モーターがBusyでないか確認する
2.方向と速度をセットする
3.STARTコマンドを送る
ただし、注意点があり
・逆方向に動かすときは、一旦STOPコマンドを送り、停止するのを待ってから、動かす
・高速モードで動いている時は、一旦STOPコマンドを送り、、以下同文(AZ GTiはSTOPを送らなくても速度変更できてしまいますが、急激な速度変更は架台に負荷をかける可能性があります。する場合は自己責任で。ちなみに高速モードのときは、架台側が自動的に加速・減速制御をしてるようです。)
・GoToモードで動いているときは、動かさない
以下、モーター1番について説明します。モーター2番のときは、コマンドの後の数字を2に読み替えてください。
1.モーターがBUSYでないか確認する(状態取得)
コマンド 「:f1」(モータ2の時は「:f2」)
※コマンドは大文字小文字の区別があります
返事例 「=301」
1文字目 0x03 = 0000 0011
右端のビット 動作モードB0: 1=Tracking, 0=Goto
右から2番目のビット 回転方向 B1: 1=CCW, 0=CW
右から3番目のビット 項目モード B2: 1=Fast, 0=Slow
2文字目 0x00 = 0000 0000
右端のビット 動作中かどうか B0: 1=Running,0=Stopped
右から2番目のビット B1: 1=Blocked,0=Normal (何に使われているか分からない…)
3文字目 0x01 = 0000 0001
右端のビット 初期化が終わっているか B0: 0 = Not Init,1 = Init done
右から2番目のビット B1: 1 = Level switch on (何に使われているか分からない…)
2文字目のビット0が1の時は動作中なので、コマンドを送ってはいけない。
ただし、現在が停止中または低速移動中で、かつ同方向への速度変更については動作中でも可能。
それ以外のときは、STOPコマンド 「:K1」を送り、「:f」コマンドで停止するまで待機する。
2.方向をセットする
Set MotionMode コマンド「:G」を使う
例 「:G130」
セットする値は 「30」 = 0000 0011 0000 0000
1文字目 [3] = 0000 0011
B0: 0=Goto, 1=Tracking 動かすときは1にセット
B1: 0=Slow, 1=Fast(T) 128倍速より早く動かすときは1にセットすること
0=Fast, 1=Slow(G) ※Gotoモードでは逆のようです。。。。
B2: 0=S/F, 1=Medium すいません、何か分かりません。0しか見たことないです。Goto時のコマンドかも。
B3: 1x Slow Goto すいません、何か分かりません。0しか見たことないです。Goto時のコマンドかも。
2文字目 [0]=0000 0000
B0: 0=CW、1=CCW モーターの回転方向を指定します。
B1: 0=Noth, 1=South すいません、何か分かりません。0しか見たことないです。Goto時のコマンドかも。
B2: 0=Normal Goto, 1=Coarse Goto すいません、何か分かりません。0しか見たことないです。Goto時のコマンドかも。
3. 速度をセットする
速度をセットするには「:I」コマンドを使います。
速度は「モーター速度の計算」で計算したTI値を使います。
| ステップ | 倍速(N) | TI値 | 16進表記 | メッセージ |
| 0 | 0.5 | 1329691 | 144A1D | 1D4A14 |
| 1 | 1 | 664846 | 0A250E | 0E250A |
| 2 | 8 | 83106 | 0144A2 | A24401 |
| 3 | 16 | 41553 | 00A251 | 51A200 |
| 4 | 32 | 20776 | 005128 | 285100 |
| 5 | 64 | 10388 | 002894 | 942800 |
| 6 | 128 | 5194 | 00144A | 4A1400 |
| 7 | 400 | 1662 | 00067E | 7E0600 |
| 8 | 600 | 1108 | 000454 | 540400 |
| 9 | 800 | 831 | 00033F | 3F0300 |
例えば恒星時の16倍なら、(AZ GTiの場合は )TI値は41553、これは16進数で 0x00A251、このプロトコルでは「51A200」となるので、送るべきメッセージは「:I151A200」 となります。
※この表はAZ GTiのもので、他のマウントでは CPR値、TI-Freq値が異なるので、都度計算する必要があります。他のマウントのコードにこの表の値をそのまま使わないでください。
4.STARTコマンドを送る
上記で回転方向と速度がセットできたので、「:J」コマンドを送ると動き出します。
例 「:J1」
5.STOPコマンドを送る
Tracking時(Gotoで目標ステップまで自動で動かす、ではない場合)、モーターはSTOPを送らないと動き続けますので、注意してください。
ヌンチャクではレバーがニュートラルになった時にSTOPを送っています。停止させるときは 「:K」コマンドを送ります
例「:K1」
2軸同時に動かす場合
SyncScanで斜め上のボタンを押すような場合、2軸同時に動かすことになります。
※初期化時の InquireStatusというコマンドで取ってくる情報に 「Tow axes must start seperately B2: Support」というのがあり、AZGTiは関係ないようですが、ドキュメントの文言からして、ここのビットが1のときは、別々に動かす必要があるかもしません。(ヌンチャクではこのビットは無視しました)
軸は二つありますが、架台とのシリアル通信は1チャンネルしかないので、交互に通信するような感じです。
これはステップ9(800倍速)で右斜め上ボタンを押した時の通信内容です。
(–>Mountへ) :f1\r 軸1 状態確認
(<–Mountから) =101\r
(–>Mountへ) :f2\r 軸2 状態確認
(<–Mountから) =101\r
(–>Mountへ) :G130\r 軸1 回転方向と高速モードセット
(<–Mountから) =\r
(–>Mountへ) :G230\r 軸2 回転方向と高速モードセット
(<–Mountから) =\r
(–>Mountへ) :I13F0300\r 軸1 速度セット
(<–Mountから) =\r
(–>Mountへ) :I23F0300\r 軸2 速度セット
(<–Mountから) =\r
(–>Mountへ) :J1\r 軸1 START
(<–Mountから) =\r
(–>Mountへ) :J2\r 軸2 START
(<–Mountから) =\r
(–>Mountへ) :K1\r 軸1 STOP(ボタンを離した時)
(<–Mountから) =\r
(–>Mountへ) :K2\r 軸2 STOP(ボタンを離した時)
(<–Mountから) =\r
その他の情報
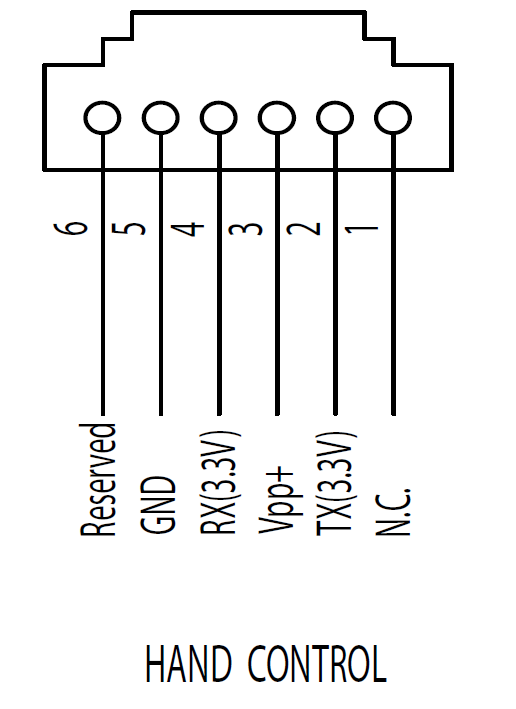
ここで扱ったのはモータープロトコルで、
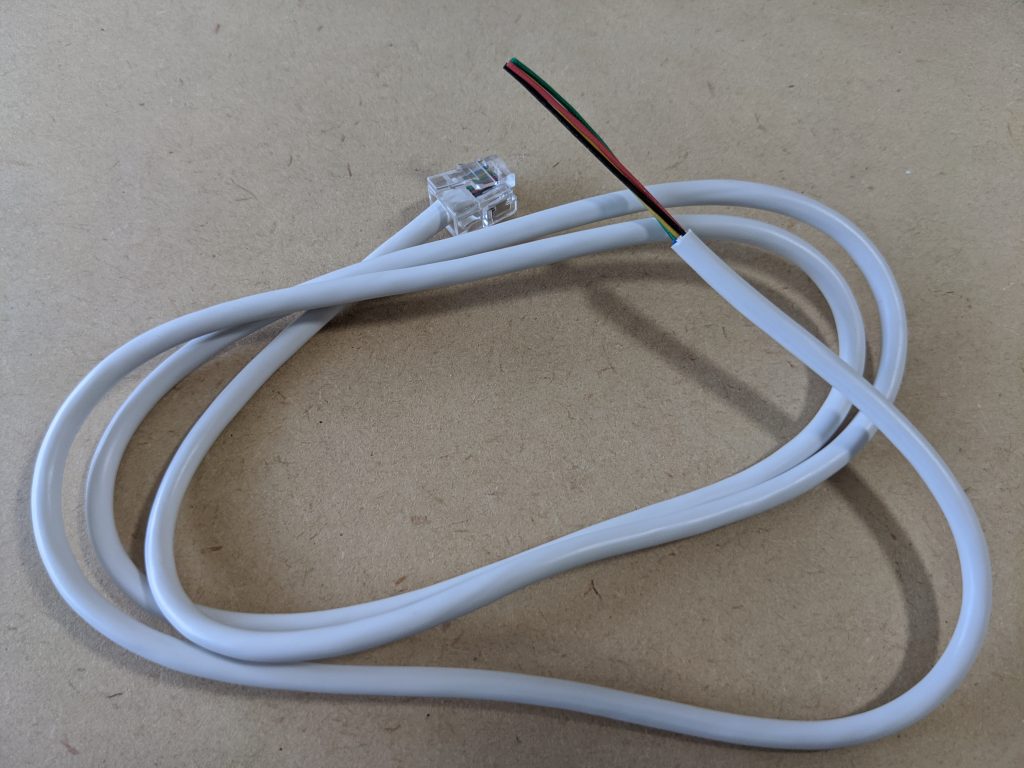
・HandControllerポートからシリアル通信で送る
・Wifi経由でUDP通信で送る
・SyncScanAppから架台へUDP通信で送る
の時に使われるものです。上記のどの経路からも送れてしまうので、気を付けて使わないとバッティングする可能性があります。稀にバッティングの結果、AZGTiがハングアップして、電源を入れ直ししないと戻りませんが、幸い壊れたことはありません(汗)
AZ GTiにはこれ以外に(SyncScanAppをサーバとして、それに対して)TCP通信できる別のコマンド体系が用意されています。こちらは赤経、赤緯を指定しての移動とかもできるみたいです。こちらはまだちゃんと調べたことがないのですが、SyncScanAppを起動していないと使えないようです。
赤道儀モード対応(9/16追記)
AZ GTiは(自己責任で)ファームウェアアップデートによって赤道儀モードにすることもできます。
Extended Inquireコマンド「:q」で状態を取得すると、
:q1010000 に対して
購入時の経緯台オンリーの時の返事
=018000 ”1″のところは 0000 0001
赤道儀選択可能な時の返事
=098000 ”9″のところは 0000 0101
仕様書によると返事2文字目のビット3は
B3: Support EQ/AZ mode
となっているので、この時SyncScanAppアプリは赤道儀選択可能になるようです。
ただ、SyncScanAppアプリで赤道儀を選択しても、経緯台を選択しても、選択時にはコマンドは何も送られません。これはつまり、経緯台か赤道儀かを判断して制御するのはアプリ側で、架台側では何もしていない事を意味します。
ついでにいうと、アライメント決定時にも何もコマンドが送られないので、アライメント情報を持ってるのはアプリ側、ということになります。
架台側は、アプリからの要求に応じてエンコーダポジションを返すのと、モーターを動かすのみのようです。
追尾について(9/16追記)
経緯台モード、赤道儀モードでの追尾についても、アプリ側に頭脳があるようです。
まず経緯台モードの時は、頻繁に(おそらく1Hz)で、アプリからポジションを問い合わせて、こまめに両方のモーターに指示を出して追尾させています。
現在の架台の状態、方位、高度から対象物の位置をリアルタイム計算するには、アライメントの情報を持っていないとできません。
これをヌンチャクに実装するには、アライメントもヌンチャクでやらないといけないことになり、ちょっと無理なので諦めました。ハンドコントローラをつないだ時は、ハンドコントローラは全部やってるのでしょう。
一方、赤道儀モードの追尾は簡単です。
操作が終了してアイドルになる時に、赤経モーターを恒星時 x1倍速で動かして、そのまま放置するだけです。SyncScanAppもそのようにしています。 太陽時駆動なら、ベースとなる速度が微妙に違うだけで、やってることは同じです。
※南半球の時は、「放置速度」が逆方向になるので注意
赤経モーター追尾時は、ボタンを押していない時はx1倍駆動、ステップ1(x0.5倍駆動)の時は、順方向なら 1+0.5=1.5倍速に、逆方向なら 1-0.5=0.5倍速になります。逆方向にステップ1(x -1)で動かすと、1-1=0 でモータが停止します。
要は全ての速度に恒星時駆動速度が足された値になります。
| ステップ | 経緯台モード・赤緯軸 | 赤道儀モードの 赤経(北半球の時) |
| 4 | x8 | 1+8= x9 |
| 3 | x4 | 1+4= x5 |
| 2 | x2 | 1+2= x3 |
| 1 | x1 | 1+1=x 2 |
| 0 | x0.5 | 1+0.5=x 1.5 |
| 停止 | x0 | 1+0= x1 |
| 0(逆方向) | x -0.5 | 1-0.5= x0.5 |
| 1(逆方向) | x -1 | 1-1 = x0(停止) |
| 2(逆方向) | x -2 | 1-2= x -1 |
| 3(逆方向) | x -4 | 1-4= x -3 |
| 4(逆方向) | x -8 | 1-8= x -7 |